Projeto
Servo Motor
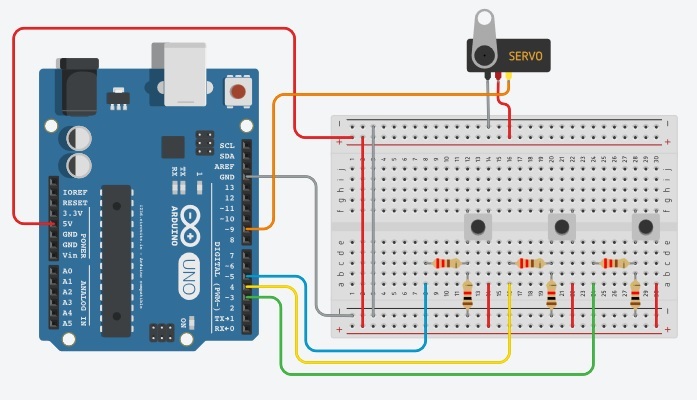
Criando o circuito do Servo Motor
=====================================================
Código do projeto do Servo Motor
#include <Servo.h>
Servo myservo;
int val;
int ChaveEsquerda=3; //Pino a ser ligado na chave esquerda
int ChaveCentral=4; //Pino a ser ligado na chave central
int ChaveDireita=5; //Pino a ser ligado na chave direita
void setup()
{
// Pino de dados do servo conectado ao pino 9 do Arduino
myservo.attach(9);
//Define o pino como entrada
pinMode(ChaveEsquerda, INPUT);
//Aciona o resistor pull-up interno
digitalWrite(ChaveEsquerda, LOW);
pinMode(ChaveCentral, INPUT);
digitalWrite(ChaveCentral, LOW);
pinMode(ChaveDireita, INPUT);
digitalWrite(ChaveDireita, LOW);
}
void loop()
{
//Le o valor da Chave Esquerda (On/Off)
val=digitalRead(ChaveEsquerda);
//Caso a chave seja pressionada, movimenta o servo
if(val == 1)
{
myservo.write(60); //Move o servo para o angulo de 60 graus
delay(15); //Delay para o servo atingir a posiçao
}
val=digitalRead(ChaveCentral);
if(val == 1)
{
myservo.write(90); //Move o servo para o angulo de 90 graus
delay(15);
}
val=digitalRead(ChaveDireita);
if(val == 1)
{
myservo.write(120); //Move o servo para o angulo de 120 graus
delay(15);
}
}